# Robot mobile à base de micro:bit
En octobre 2021, j'ai participé au DevFest à Nantes où j'ai présenté différents robots et montages associés avec des cartes microbit pour apprendre aux enfants à programmer.
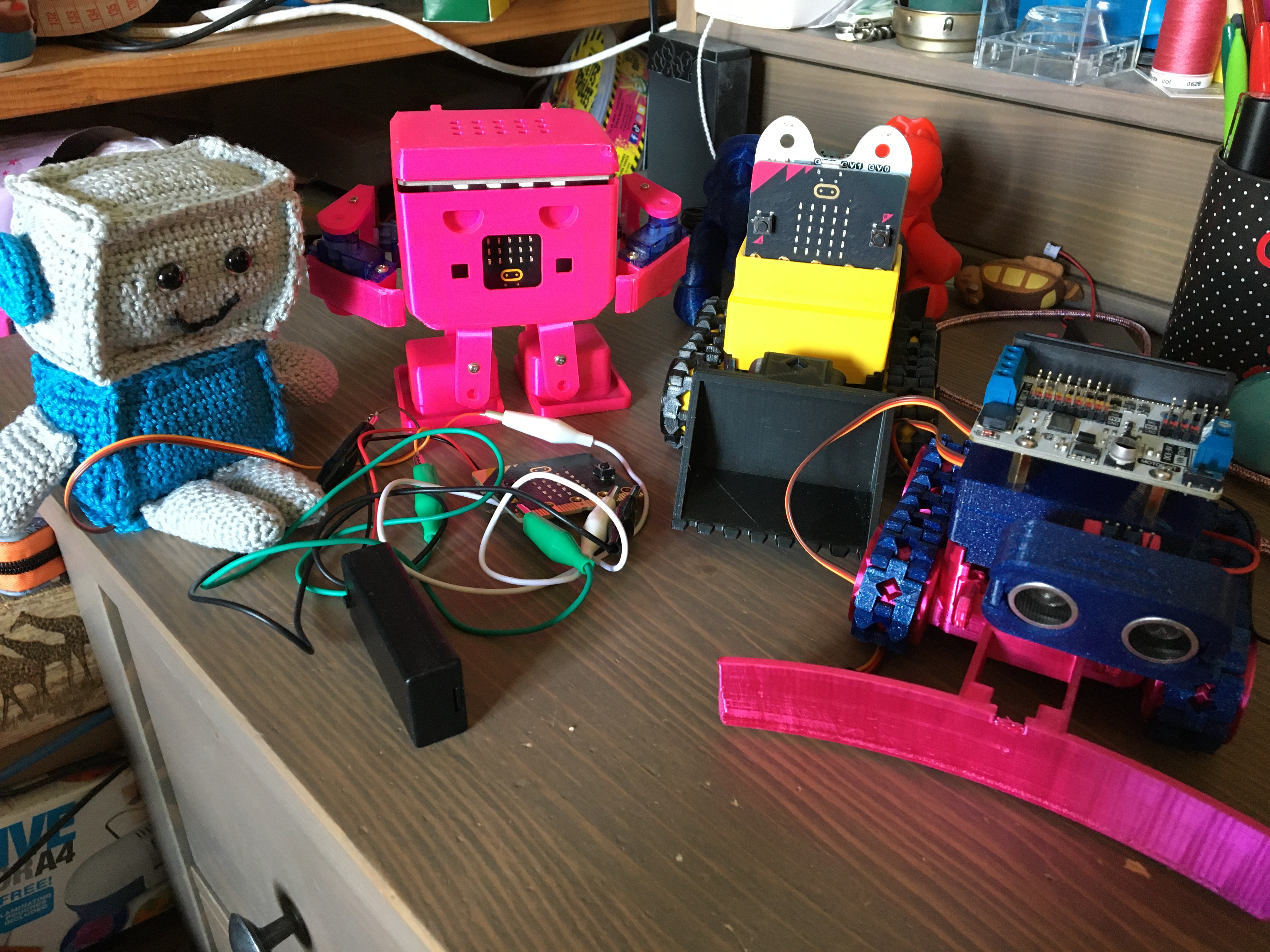
Suite à cette présentation, je n'avais pas pris le temps d'écrire un billet pour présenter plus en détail le premier robot mobile surnommé "Bumblebee" dont j'avais modélisé le support pour la carte ring:bit permettant de commander jusqu'à 3 servo-moteurs.
# Modélisation du support de la carte ring:bit et impression 3D

Pour modéliser le support de la carte ring:bit, j'ai utilisé le logiciel Shapr3D sur iPad car je le trouve très intuitif et il fonctionne très bien au stylet, je n'ai pas pris encore le temps non plus de me former à l'utilisation de Fusion360 sur l'ordinateur ce qui ne m'aidait pas non plus 😕.
J'ai fait plusieurs essais avant de trouver le modèle de support qui me convenait, je modélisais le support, je l'imprimais, j'installais la carte dessus, je regardais si ça fonctionnait bien comme ça et je notais ce que je devais améliorer. Puis je recommençais jusqu'à arriver au rendu que je souhaitais.
La base du robot mobile est un robot SMARS (Screwless/Screwed Modular Assemblable Robotic System) à laquelle j'ai ajouté le support pour la carte ring:bit ainsi que la pelleteuse commandée aussi via un servo-moteur
Voici la liste des modèles STL que j'ai utilisé pour concevoir mon robot Bumblebee ainsi que le modèle que j'ai conçu pour le support de la carte ring:bit :
- base SMARS contenant la plupart des éléments pour construire son propre robot mobile SMARS
- base permettant d'insérer des servo-moteurs pour les roues
- pelleteuse
- support pour ring:bit
# Composants et matériaux utilisés
Pour les composants électroniques, j'ai utilisé :
- 2 servo-moteurs FT90 (servo-moteurs à rotation continue) pour les roues
- 1 servo-moteur SG90 (rotation à 180°) pour la pelleteuse
- 1 carte ring:bit d'Elecfreaks disponible chez Kubii par exemple
- 2 carte micro:bit (une pour le robot et une pour le radio commander)
Pour les impressions 3D, j'ai utilisé 2 couleurs de filament PLA :
- jaune de 3D Jake
- noir de marque inconnue
Pour faire ce robot, j'ai aussi testé avec d'autres filaments tels que :
- violet de Amazon basics qui a un bon rendu mais plus rose que violet
- bleu marine mat de Eryone dont je suis fan mais j'avais fini ma bobine pour faire un nouveau robot avec
- bleu vert de 3D Jake qui m'a beaucoup plu mais je n'avais pas pris une grosse bobine, je voulais tester avant, peut-être que j'en reprendrai plus tard
# Programmation
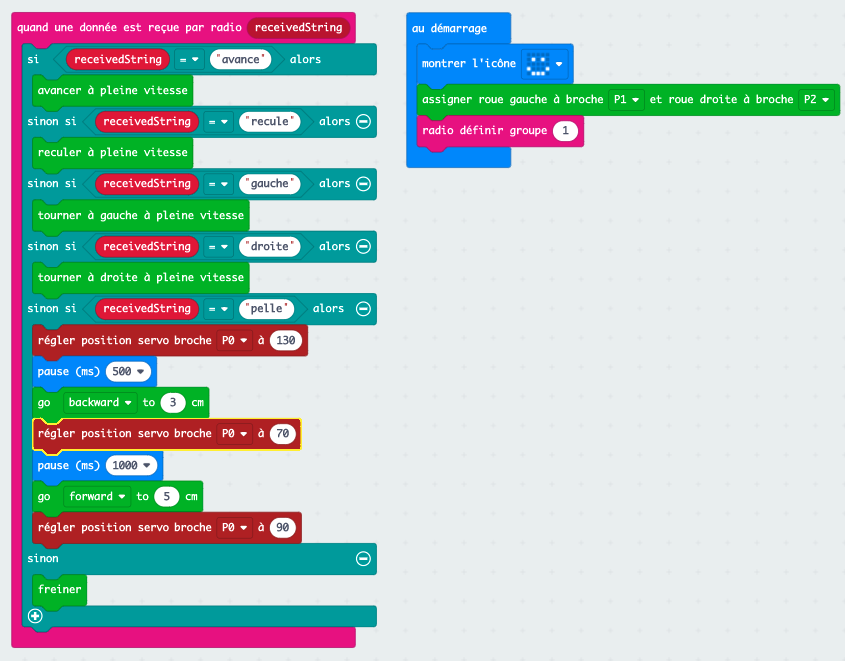
J'ai utilisé Makecode Editor pour programmer les cartes micro:bit pour le robot et pour le commmander. Les programmes sont assez simples à mettre en oeuvre, on utilise l'extension RingbitCar qui permet de commander les servo-moteur affectés à la roue droite et à la route gauche. On utilise aussi les fonctions de base Broches qui permettent d'écrire sur une broche spécifique de la micro:bit pour commander la pelleteuse. Et pour la gestion de la commande du robot, on passe par les fonctions de base Radio qui permettent d'envoyer et de recevoir des messages via radio.
Voici le programme pour le robot :
Et le programme pour la partie commande (valable aussi pour le deuxième robot construit autour de moteurs) :
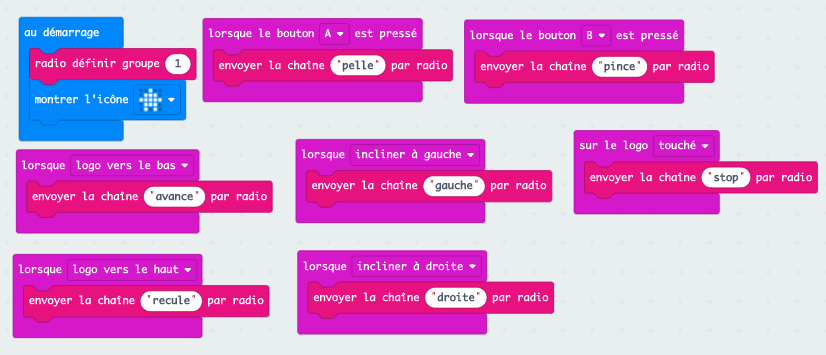
Ces programmes sont aussi disponibles sur mon Github :
# Conclusion
Je me suis beaucoup amusée à construire ce robot et ma présentation autour de ce robot et de ses copains. J'ai beaucoup appris sur la modélisation 3D, j'imprimais jusque là principalement des modèles trouvés sur le net et j'ai trouvé sympa de concevoir mon propre modèle pour répondre au plus près à mon besoin. J'ai aussi beaucoup joué avec Makecode et pour la première fois, j'ai poussé mes programmes sur mon Github pour en garder une trace. Je suis toujours aussi fan de la carte micro:bit et des possibilités qu'elle offre quand on commence à creuser encore plus loin dans ses possibilités, c'est top !
Maintenant que je vous ai partagé mes secrets, si vous essayiez de faire vos propres versions. Prenez du plaisir et amusez-vous bien !